19. yüzyılın sonunda bisikletler kullanılmaya başlandığında, onlar için bir ehliyet almanız gerekiyordu. Sürüş teorisi ve pratiğini öğretmek ve plaka vermek üzere saygın bir komite kurulmuştur. Kimsenin aracı teslim etmesine izin verilmedi. Dikkatli olunmasının nedeni, iki tekerlekli araç kullanmanın artan riski ile açıklanmıştır. Sıradan bir insan bir bisikletin hareket halindeyken neden devrilmediğini anlayamaz. Şaşırtıcı bir şekilde, tekerlekli sistemlerin işleyişini inceleyen fizikçiler bile bu basit soruyu net bir şekilde yanıtlayamıyor.
Teorik analiz ve fizik deneyleri, jiroskopik momentum ve pozitif çatal hareketinin bisiklet stabilitesi için yeterli olmadığını göstermiştir. Kontrollü direksiyonun yanı sıra otomatik direksiyon da mevcuttur. Dahası, yük dağılımı dengenin korunmasında önemli bir rol oynar. Gördüğünüz gibi, motosikletin oldukça uzun ömrü sayesinde yeni nitelikler keşfedilmeye ve geliştirilmeye devam ediyor.
Bir bisiklet sürüldüğünde neden devrilmez?
İşin kolaylığını anlatmak için sık sık bir metafor kullanılır: ‘bisiklete binmek kadar basittir’. Aslında, ulaşım araçlarının düşmesini engellemek gerekir. İlk başta bisikletin sürücünün zararına sürüldüğü düşünülüyordu. Bir kişi yapının eğimini algılar, gidonu hafifçe düşme yönünde çevirir ve sürüşü düzleştirir. Ancak yüksek hızda bisiklet denge kazanır ve gidon serbest bırakıldığında bile düşmez. Daha sonra, ön tekerleğin jiroskopik etkisi ve direksiyon hakkında hipotezler ortaya atılmıştır. Ancak güdümsüz bisikletlerin ve robotik bisikletçilerin de düşmediği ortaya çıktı.
Stabilitenin nedenine ilişkin temel soru şudur: Yalınlık ve dönüş arasındaki uygun ilişkiye ne neden olur? Genel olarak kabul edilen bir görüş vardır: etki, dönme (jiroskopik) torku ve pozitif çatal uzamasının bir sonucu olarak ortaya çıkar. Ön tekerleğin dengeleyici etkisi ve hareketin düz bir yoldan sapmasının neden olduğu merkezkaç kuvveti, motosikletin dengesi için gerekli faktörlerdir.
Fizik açısından bakıldığında
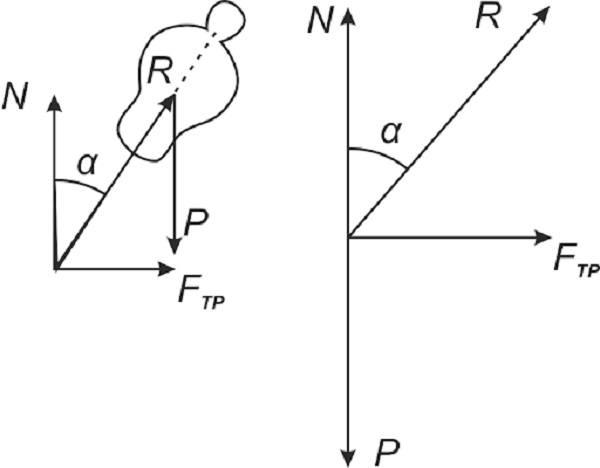
Bilim insanları iki tekerlekli araçların dengede kalmasını sağlayan modeli belirledi. Ön çatal merkezde yer alır. Düzenleme, gidon aksının yere göre eğimli olmasını içerir. Kesişme noktası, bisiklet tekerleğinin yol ile temas hattının önündedir. Yekenin açısı ayarlanan değerden saparsa, taşıyıcıyı tekrar konumuna getiren bir reaksiyon kuvveti üretilir. Bisikletin kendisi dengeyi korumaya bu şekilde yardımcı olur.
Dönüş yapmak için sürücünün ağırlık merkezini değiştirmesi gerekir. Örneğin, motosiklet sağa doğru açı yaptığında, ön aks da sağa doğru açı yapar ve saat yönünde dönen tekerlek (aşağıdan bakıldığında) reaktif torku kısmen direksiyon ünitesine aktarır. Merkezkaç kuvveti direksiyon simidini sağa çevirme eğilimindedir. Dönüş yapmak için bisikletçi sola doğru eğilir, bisikleti ve tekerlekleri sağa doğru saptırır.
Aracı dengelemek için kullanılan ikinci faktör ise yavaşlarken hız kazanmak ve direksiyonu kırmaktır. Dengeleyici eylem tekerlekleri doğru konuma getirir ve bisikletin düşmesini önler. Deneyimli bir bisikletçi, yola 2-3 mm yön vermek için ellerini montaj noktalarında kullanır.
Jiroskopik etki
Denge teorisi uzay, havacılık ve deniz seyrüseferinde kullanılan iyi bilinen bir fiziksel olguya dayanmaktadır. Dönen bir nesnenin hareket yönünü koruma özelliğine jiroskopik kuvvet denir. Bu eylem, bisiklet eğikken sürüldüğünde görülür. Tekerlekler döndüğü sürece araç dengesini korur ve asla devrilmez. Örneğin, bir yılbaşı ya da çocuk helikopteri sadece dönerken “çalışır”. Hipotezi test etmek için fizikçiler özel bir bisiklet tasarımı oluşturdular. Ön tarafa yere değmeyen ve ters yönde dönen ekstra bir tekerlek takıldı. Deneyin sonucu bilim insanlarını şaşırttı. Bisiklet mükemmel bir şekilde hareket etti ve jiroskop olmadan düşmedi.
Böylece, hareket halindeki iki tekerlekli bir aracın dengesini etkileyen ana faktörleri teyit eden bilim adamları, yeni versiyonları tartışmaya devam ediyor.
İlginç gerçekler
V.A. Yakubovich
- Hareket halindeki bir bisikletin dengesini açıklayan matematiksel teori, Bilim Doktoru V.A. Yakubovich tarafından ortaya atılmıştır. Bilim adamı, bir bisikleti kontrol eden otonom bir robotun neden hiç yaratılmadığını açıkladı. İnternette dolaşan mekanik bisikletçilerle ilgili bilgilerin sahte olduğu ortaya çıktı. Sibernetikçiye daha yakından bakıldığında bir dizi numara ortaya çıktı. Mucitler, yapının dengesini artırmak için ağırlıklar eklediler, ağırlık merkezini düşürdüler ve sürüş bisikletini yüksek hızlara çıkardılar.
Bilim insanının karşıtları aksini kanıtlıyor. Robot çok hızlı öğreniyor. Bunun nedeni, görevlerinin göreceli basitliğidir: sadece dengenizi nasıl koruyacağınızı öğrenmeniz gerekir. İnsanların sahip olmadığı bir yeteneğe sahiptir: anında tepki verir ve tekerleği saniyede 5 kez “seğirtir”.
- ABD’li bilim insanlarının iddiasına göre, sürücüsü olmayan bir bisiklet, düşmemek için otomatik olarak kendini yönlendirebilir. Doğrusallaştırılmış denge hesaplamaları sayesinde araştırmacılar, ters yönde dönen ekstra tekerleklere ve negatif gidon duruşuna sahip bir bisiklet tasarladılar.
- Psikologların görüşü fizikçilerinkinden farklıdır. Motosikletin enerji kaynakları sürücünün kafasındadır. İnsan beyni düşmemizi engellemek için çok çalışır. Beceri ve maharet, bisikletçiyi dengede tutan bilinçaltı tutumlarda yatar.
Sonuç
Kanıtlar, sürüş sırasında bisikleti sabit tutmada jiroskop ve tekerin önemini desteklemektedir. Ancak bisiklet sürerken neden devrilmediğine dair net bir açıklama yoktur. Anlaşılması geçici olarak mevcut bilginin ötesinde olan ek bir güç olabilir.






Yine de sürüş sırasında motosikletin devrilmediğini düşünüyorum çünkü sürücü dengesini koruyor ve gidonu düşme yönünde çevirerek düzeltiyor. Sürüş sırasında jiroskopik torkun tekerlek üzerindeki etkisi olası değildir, tekerleğin hızı ve tekerleğin kütlesi reaktif tork oluşturacak kadar büyük değildir.
Direksiyon deneyi, sürücünün dengeyi sağladığını doğrulamamıştır. Motosikleti sürücü olmadan sertçe itin, gidon sıkışmış olsa bile sürecek ve devrilmeyecektir.